產(chǎn)品中心
美國(guó)強(qiáng)鹿柴油機(jī)維修配件技術(shù)中心
約翰迪爾John Deere柴油機(jī)配件 美國(guó)麥克福斯
卡特彼勒柴油發(fā)動(dòng)機(jī)參數(shù)
沃爾沃發(fā)動(dòng)機(jī)全系參數(shù)
英國(guó)珀金斯原廠配件
珀金斯柴油機(jī)技術(shù)中心
珀金斯發(fā)動(dòng)機(jī)零件查詢圖冊(cè)
日本三菱柴油機(jī)發(fā)電機(jī)配件
德國(guó)道依茨 韓國(guó)大宇柴油發(fā)動(dòng)機(jī)配件
康明斯全系列柴油發(fā)動(dòng)機(jī)
沃爾沃 MTU 原廠配件銷售中心
瑞典沃爾沃遍達(dá)原裝柴油機(jī)配件
康明斯維修技術(shù)中心
卡特彼勒柴油發(fā)動(dòng)機(jī)原廠配件銷售中心
品牌柴油發(fā)電機(jī)組
康明斯柴油發(fā)動(dòng)機(jī)配件中心
威爾信發(fā)電機(jī)組EIM介面模塊630-089(630-466)
威爾信發(fā)電機(jī)組EIM介面模塊630-089(630-466)
630-465,630-466,650-091,650-092,650-045
|
項(xiàng)目 |
描述 |
項(xiàng)目 |
描述 |
|
1. |
預(yù)熱插件圖標(biāo) |
8. |
次連接頭插口 |
|
2. |
燃油閥門圖標(biāo) |
9. |
啟動(dòng)馬達(dá)線圈熔斷器 |
|
3. |
燃油閥線圈熔斷器 |
10. |
啟動(dòng)馬達(dá)LED指示燈 |
|
4. |
燃油閥LED指示燈 |
11. |
超速LED指示燈 |
|
5. |
主連接頭插口 |
12. |
超速設(shè)定調(diào)整器 |
|
6. |
預(yù)熱插件熔斷器 |
13. |
啟動(dòng)馬達(dá)圖標(biāo) |
|
7. |
預(yù)熱插件LED指示燈 |
當(dāng)前兩種型號(hào)的EIM模塊可供選用:
EIM Basic(基本型)和EIM Plus(增強(qiáng)型)
EIM Basic(基本型):該EIM模塊被用于與LCP1鑰匙啟動(dòng)屏和、奇才自啟動(dòng)屏配合使用。它由三個(gè)聯(lián)合油門控制線圈、啟動(dòng)馬達(dá)線圈、預(yù)熱插件驅(qū)動(dòng)電路的繼電器組成。該模塊直接由啟動(dòng)電池供電。
EIM Plus(增強(qiáng)型):該EIM模塊被用于與LCP2自啟動(dòng)屏和LCP1鑰匙啟動(dòng)屏配合使用。它同樣由以上所述的三個(gè)繼電器電路組成,同時(shí)增加了通過裝于引擎飛輪室外殼的轉(zhuǎn)速傳感器(MPU)監(jiān)測(cè)引擎轉(zhuǎn)速的電路,并可設(shè)定超速臨界值。該模塊直接由啟動(dòng)電池供電。EIM Plus通過轉(zhuǎn)速傳感器(MPU)獲取轉(zhuǎn)速信號(hào),如果轉(zhuǎn)速信號(hào)上升超過預(yù)設(shè)值,會(huì)向發(fā)電
機(jī)組控制屏發(fā)送一個(gè)0伏信號(hào)啟動(dòng)控制屏的超速故障保護(hù)電路。一EIM模塊功能
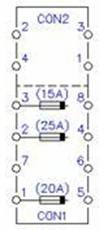
EIM(Engine Interface Module)是一個(gè)界于控制屏和發(fā)動(dòng)機(jī)之間的,將控制屏的控制指令轉(zhuǎn)換為對(duì)發(fā)動(dòng)機(jī)的操作指令的,用于啟動(dòng)、保護(hù)和控制發(fā)動(dòng)機(jī)的界面模塊。EIM模塊的接線端口如圖4—1所示。EIM模塊各端口功能如4—1表所列:
 2008-7-8 20:03 上傳
2008-7-8 20:03 上傳
表4—1
EIM模塊各端口功能
|
端口 |
功能敘述 |
端口 |
功能敘述 | |
|
CON1/1 |
“啟動(dòng)馬達(dá)工作”輸出 |
CON1/7 |
接地/接負(fù)極 | |
|
CON1/2 |
“發(fā)動(dòng)機(jī)預(yù)熱”輸出 |
CON1/8 |
“油門電磁閥工作”輸入 | |
|
CON1/3 |
“油門電磁閥工作”輸出 |
CON2/1 |
“超速”輸出 | |
|
CON1/4 |
“發(fā)動(dòng)機(jī)預(yù)熱”輸入 |
CON2/2 |
轉(zhuǎn)速輸入 | |
|
CON1/5 |
電源輸入 |
CON2/3 |
“發(fā)動(dòng)機(jī)運(yùn)行”輸出 | |
|
CON1/6 |
“啟動(dòng)馬達(dá)工作”輸入 |
CON2/4 |
內(nèi)部保護(hù)繼電器負(fù)極接口 |
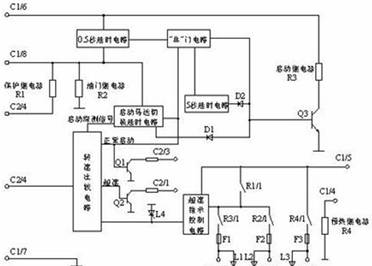
二、 EIM模塊工作原理
EIM模塊內(nèi)部框圖如圖4—2所示。我們將從電啟動(dòng)過程、啟動(dòng)失敗過程、正常運(yùn)行過程和超速報(bào)警過程來分別敘述EIM模塊的工作原理。
1.電啟動(dòng)過程
啟動(dòng)時(shí),控制屏與EIM的CON1/6和CON1/8端口對(duì)應(yīng)的接口同時(shí)導(dǎo)通,12V或24V直流電壓通過這兩個(gè)端口輸入EIM模塊。此時(shí),保護(hù)繼電器R1加電動(dòng)作,其觸點(diǎn)R1/1閉合;油門繼電器R2也同時(shí)加電,其觸點(diǎn)R2/1閉合;電源通過R1/1、R2/1和熔芯向CON1/3端口輸出,L2同時(shí)點(diǎn)亮指示“油門電磁閥工作”端口有電壓輸出。在CON1/6端口輸入電源后, 0.5秒延時(shí)電路接通,并在得電0.5秒后接通 “‘非’門電路”, “‘非’門”電路的輸出電壓加到三極管“Q
 2008-7-8 20:03 上傳
2008-7-8 20:03 上傳
2.啟動(dòng)失敗過程
如果在“啟動(dòng)馬達(dá)切換延時(shí)電路”的延時(shí)時(shí)間內(nèi),發(fā)動(dòng)機(jī)還無法達(dá)到啟動(dòng)轉(zhuǎn)速,此時(shí)“啟動(dòng)馬達(dá)切換延時(shí)電路”向Q1輸出電壓,Q1導(dǎo)通,Q1的輸出端和輸出低電平,即向CON2/3端口發(fā)出低位開關(guān)信號(hào);同時(shí)“啟動(dòng)馬達(dá)切換延時(shí)電路”的輸出也加到“‘非’門電路的輸入端, “‘非’門電路”輸出電壓為低電平,該電平加到Q3的基極,Q3關(guān)斷,使啟動(dòng)繼電器R3釋放,觸點(diǎn)R3/1斷開,輸出端口CON1/1沒有電壓輸出,啟動(dòng)馬達(dá)電磁開關(guān)失壓釋放、啟動(dòng)馬達(dá)退出與飛輪的嚙合狀態(tài),L1熄滅以指示“啟動(dòng)馬達(dá)工作”端口沒有電壓輸出。
3.正常運(yùn)行過程
發(fā)動(dòng)機(jī)的轉(zhuǎn)速傳感器MPU通過感應(yīng)飛輪轉(zhuǎn)速,將發(fā)動(dòng)機(jī)轉(zhuǎn)速轉(zhuǎn)化為電壓信號(hào)通過CON2/4端口輸入EIM模塊中的“轉(zhuǎn)速比較電路”。如果轉(zhuǎn)速超過預(yù)定啟動(dòng)轉(zhuǎn)速,“轉(zhuǎn)速比較電路”的“啟動(dòng)探測(cè)信號(hào)”端口便向“啟動(dòng)馬達(dá)切換延時(shí)電路”輸出電壓信號(hào),“啟動(dòng)馬達(dá)切換延時(shí)電路”的輸出信號(hào)加到“‘非’門電路”的輸入端,從而使“‘非’門電路”輸出為低點(diǎn)平,Q3關(guān)斷,啟動(dòng)繼電器R3釋放,其觸點(diǎn)R3/1斷開,CON1/1端口沒有電壓輸出,啟動(dòng)馬達(dá)停止工作退出與飛輪的嚙合狀態(tài),L1同時(shí)熄滅,指示“啟動(dòng)馬達(dá)工作”端口沒有電壓輸出;此時(shí),“轉(zhuǎn)速比較電路”的“發(fā)動(dòng)機(jī)正常啟動(dòng)”端口便輸出電壓,使Q1輸入為高電平而(負(fù)極)導(dǎo)通,由CON2/3端口輸出低位開關(guān)信號(hào),因此控制屏的相應(yīng)接收端口通過該端口對(duì)地導(dǎo)通,即接收到“發(fā)動(dòng)機(jī)正常啟動(dòng)”信號(hào)。在該過程中,啟動(dòng)馬達(dá)退出與飛輪嚙合轉(zhuǎn)動(dòng)的工作狀態(tài),而油門電磁閥則始終保持吸合的工作狀態(tài)。
4.超速報(bào)警過程
當(dāng)發(fā)動(dòng)機(jī)運(yùn)行在超速狀態(tài)時(shí),EIM模塊中的“轉(zhuǎn)速比較電路”通過轉(zhuǎn)速傳感器MPU感應(yīng),得到轉(zhuǎn)化為電壓信號(hào)的轉(zhuǎn)速,與預(yù)定的超速轉(zhuǎn)速比較,如果轉(zhuǎn)速超過了預(yù)定的超速轉(zhuǎn)速,則“轉(zhuǎn)速比較電路”的“發(fā)動(dòng)機(jī)超速”端口便輸出高電壓控制信號(hào),使Q2與地(負(fù)極)導(dǎo)通,由CON2/1的輸出端口輸出低位開關(guān)信號(hào),因此控制屏的相應(yīng)接收端口通過該端口對(duì)地導(dǎo)通,即接收到“發(fā)動(dòng)機(jī)正常啟動(dòng)”信號(hào)。發(fā)動(dòng)機(jī)超速的保護(hù)信號(hào)是由控制屏輸出的,即如果控制屏無法輸出保護(hù)停機(jī)信號(hào),EIM模塊也無法執(zhí)行超速保護(hù)停機(jī)功能。
其中,“‘非’門電路”是一個(gè)控制電路,它根據(jù)兩個(gè)控制端口的輸入狀態(tài),來確定自身輸出狀態(tài),如果兩個(gè)控制端口中任何一個(gè)的輸入不為零狀態(tài),則自動(dòng)取消輸出;啟動(dòng)馬達(dá)切換時(shí)間繼電器是一個(gè)通過延時(shí)有效閉合來避免“啟動(dòng)探測(cè)信號(hào)”端口誤動(dòng)作,從而導(dǎo)致啟動(dòng)馬達(dá)在發(fā)動(dòng)機(jī)轉(zhuǎn)速尚未達(dá)到預(yù)定啟動(dòng)轉(zhuǎn)速就退出與飛輪的嚙合狀態(tài),使發(fā)動(dòng)機(jī)無法正常啟動(dòng),繼電器既有控制作用,又有保護(hù)作用;另一個(gè)控制“‘非’門電路”的是“5秒延時(shí)電路”,該電路在“‘非’門電路”向Q3輸出電壓時(shí)便導(dǎo)通并開始計(jì)時(shí),如果在延時(shí)時(shí)間內(nèi)發(fā)動(dòng)機(jī)還無法達(dá)到預(yù)定轉(zhuǎn)速,該電路也將觸發(fā)“‘非’門電路”關(guān)閉向Q3中性極的電壓輸出,使啟動(dòng)馬達(dá)停止工作退出與飛輪的嚙合狀態(tài),這是一個(gè)對(duì)啟動(dòng)馬達(dá)和啟動(dòng)繼電器起保護(hù)作用的電路;“超速指示控制電路”是一個(gè)控制電路,在發(fā)動(dòng)機(jī)轉(zhuǎn)速正常的情況下,它的輸出大于或等于“轉(zhuǎn)速比較電路”的“超速指示信號(hào)”端口的輸出,因此不會(huì)使L4點(diǎn)亮,而一旦發(fā)動(dòng)機(jī)超速,“超速指示信號(hào)”端口的輸出將增大,根據(jù)基爾霍夫定律,為了維持“超速指示信號(hào)”端口、“超速指示控制電路”端口和L4結(jié)點(diǎn)的電壓平衡,則地對(duì)L4輸出電壓,L4導(dǎo)通點(diǎn)亮,指示發(fā)動(dòng)機(jī)超速。
EIM保護(hù)模塊在威爾信柴油發(fā)電機(jī)組中的應(yīng)用十分廣泛,大部分型號(hào)的發(fā)電機(jī)組都使用了EIM模塊。沒有使用EIM模塊的只有久保田系列發(fā)動(dòng)機(jī)、利斯特系列發(fā)動(dòng)機(jī)及2300、2800系列電噴發(fā)動(dòng)機(jī)。
超速報(bào)警的設(shè)定方法
機(jī)組如起動(dòng)時(shí)出現(xiàn)超速報(bào)警,請(qǐng)先在將超速報(bào)警調(diào)整微調(diào)11順時(shí)針轉(zhuǎn),直到機(jī)組能夠正常起動(dòng)(有時(shí)可能需轉(zhuǎn)十幾圈),機(jī)組起動(dòng)后運(yùn)行于正常轉(zhuǎn)速時(shí),旁邊的超速LED指示燈將長(zhǎng)亮,此時(shí),還需將微調(diào)11逆時(shí)針轉(zhuǎn)到此指示燈剛剛好熄時(shí),此時(shí),已設(shè)定好相應(yīng)的超速報(bào)警值。停機(jī)、再一次重新起動(dòng)機(jī)組,檢查是否調(diào)整過頭,是否起動(dòng)時(shí)還出現(xiàn)超速報(bào)警。